Con la trompa robótica Shin Chan haría maravillas
El prototipo que podéis ver en el vídeo más abajo tiene una movilidad relativamente reducida debido a las pocas secciones que utiliza, pero con suficientes podría convertirse casi en una especie de tentáculo urotsukidojiano.
[youtube]http://www.youtube.com/watch?v=0DNJwM8lyBo[/youtube]
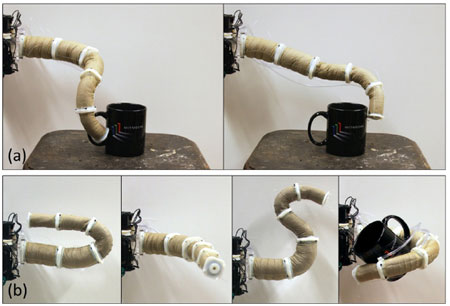
El principio es sencillo, combinando el principio de actuador por atoramiento, que utiliza un contenedor elástico con material granulado en su interior y que al aplicar vacío permite agarrar objetos al deformarse, y junto con el uso de cables externos, se consigue una movilidad y agarres increíbles.
El atoramiento por secciones con válvulas de vacío consigue darle rigidez y capacidad de agarre para todo tipo de objetos, mientras que los cables guían la forma en que se dobla para conseguir movimientos y posiciones complicadas.
Gracias a esto, ahora sólo queda ponernos electrodos por el cuerpo y dormir en cubetas de yogur mientras seguimos contaminando la atmósfera para ponérselo un poquito más fácil a los robots de Matrix. [IEEE Spectrum]